前言
接下来我们将对多目标跟踪任务中的数据关联算法进行研究,我将结合一些文献和自己的理解,利用一些工具对相关数据关联算法进行实验,包括基于IOU的贪婪匹配、基于匈牙利和KM算法线性偶图匹配、基于图论的离线数据关联(主要介绍最小代价流)以及最新的一些基于深度学习的端到端数据关联网络。代码我都会随博客一起发到github。
1 背景简介
之前我们也说到,目前主流的MOT框架是DBT框架,这种框架的特点就是离不开数据关联算法,不论是对不同帧之间跟踪轨迹的关联还是跟踪轨迹和观测量的关联, 有数据关联才能更好的保证目标ID的连续性。数据关联算法以偶图匹配类为主,尤其是在离线跟踪中存在有大量基于图论的算法,比如:最小代价流、最大流、最小割、超图等等。而近两年也出现了一批端到端的数据关联算法,对于这一点呢,有几个很大的问题,一个是数据关联是一个n:m的问题,而网络对于输出的尺寸一般要求是固定的,如果构建关联矩阵是一个问题。另外,数据关联从理论上来讲是一个不可导的过程,其包含有一些排序的过程,如何处理这一点也很重要。
2 基于IOU的贪婪匹配
2.1 IOU Tracker & V-IOU Tracker
不得不说IOU Tracker和他的改进版V-IOU Tracker算是多目标跟踪算法中的一股清流,方法特别简单粗暴,对于检测质量很好的场景效果比较好。首先我们交代一下IOU的度量方式:
$$ IOU\left( {a,b} \right) = \frac{{Area\left( a \right) \cap Area\left( b \right)}}{{Area\left( a \right) \cup Area\left( b \right)}} $$
IOU Tracker的跟踪方式没有跟踪,只有数据关联,关联指标就是IOU,关联算法就是一种基于IOU的贪婪匹配算法:
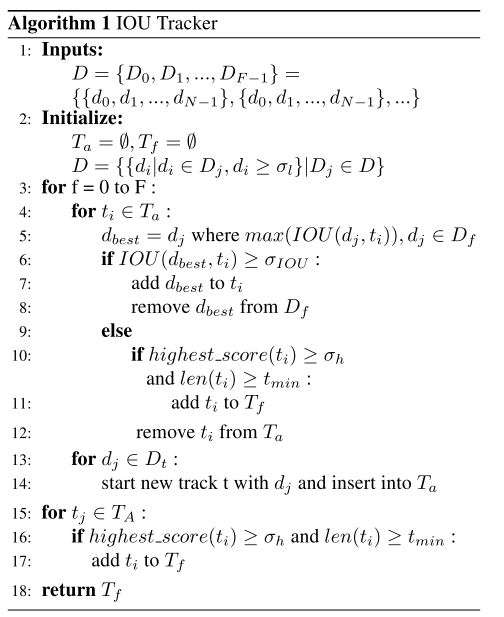
这里我们留到下一节将,我会利用不同的贪婪方式进行IOU匹配。那么V-IOU的改进就是,由于IOU Tracker仅仅是对观测量进行了关联,当目标丢失或者检测不到的时候,便无法重建轨迹,因此V-IOU加入了KCF单目标跟踪器来弥补这一漏洞,也很粗暴。。
2.2 IOU Matching
基于贪婪算法的数据关联的核心思想就是,不考虑整体最优,只考虑个体最优。这里我设计了两种贪婪方式,第一种Local IOU Matching,即依次为每条跟踪轨迹分配观测量,只要IOU满足条件即可,流程如下:
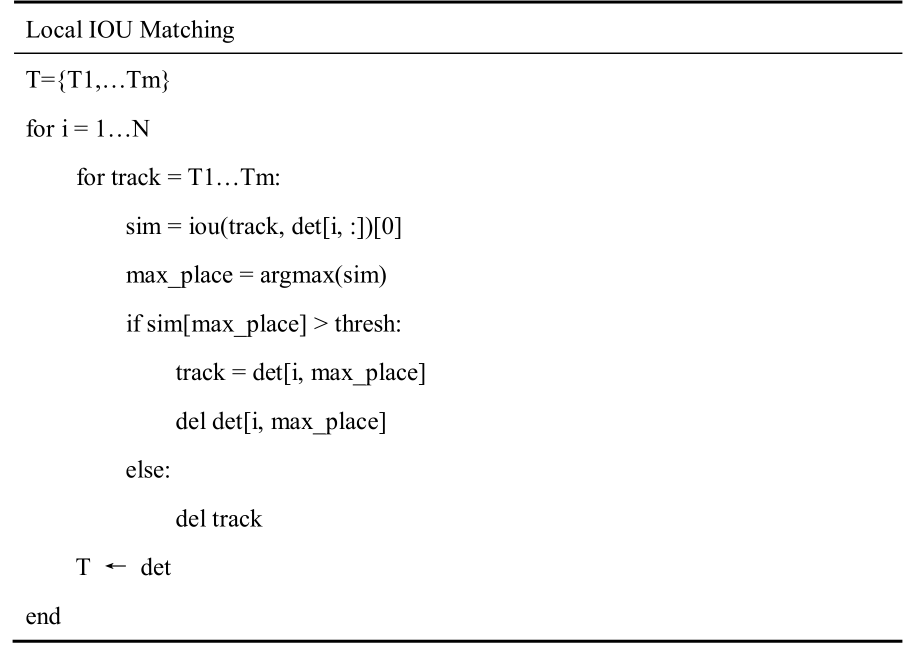
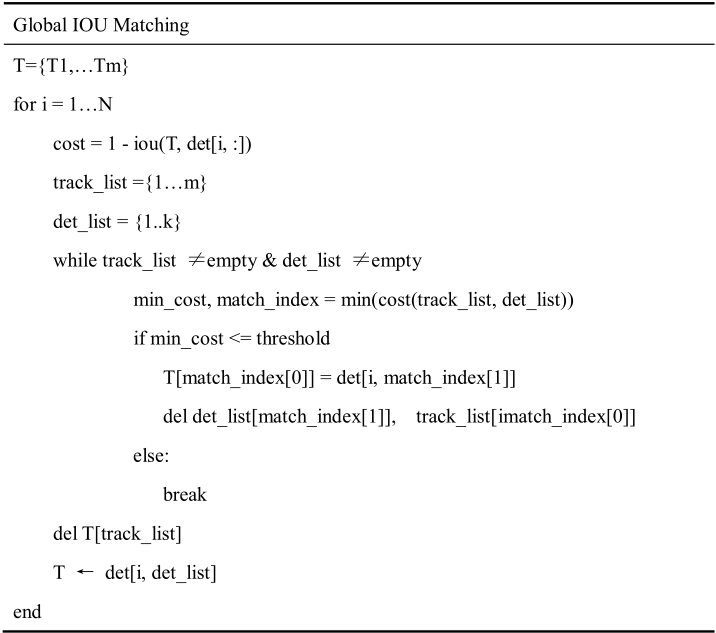
IOU Tracker就是采用的这种局部贪心方式,这种贪心策略的特点是每次为当前跟踪轨迹选择与之IOU最大的观测量。那么我们再提出一种全局的贪婪策略,即每次选择所有关联信息中IOU最大的匹配对,流程如下:
这两种贪婪方式的代码如下:
1 | def GreedyAssignment(cost, threshold = None, method = 'global'): |
下面我们先看看两种方式的跟踪效果:
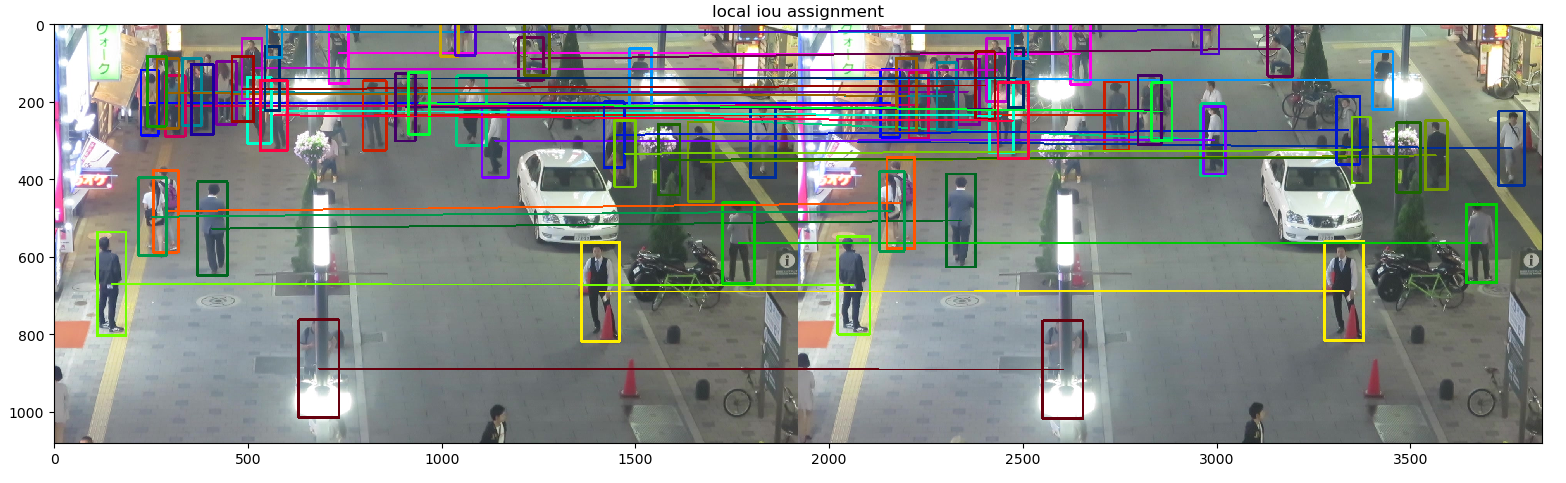
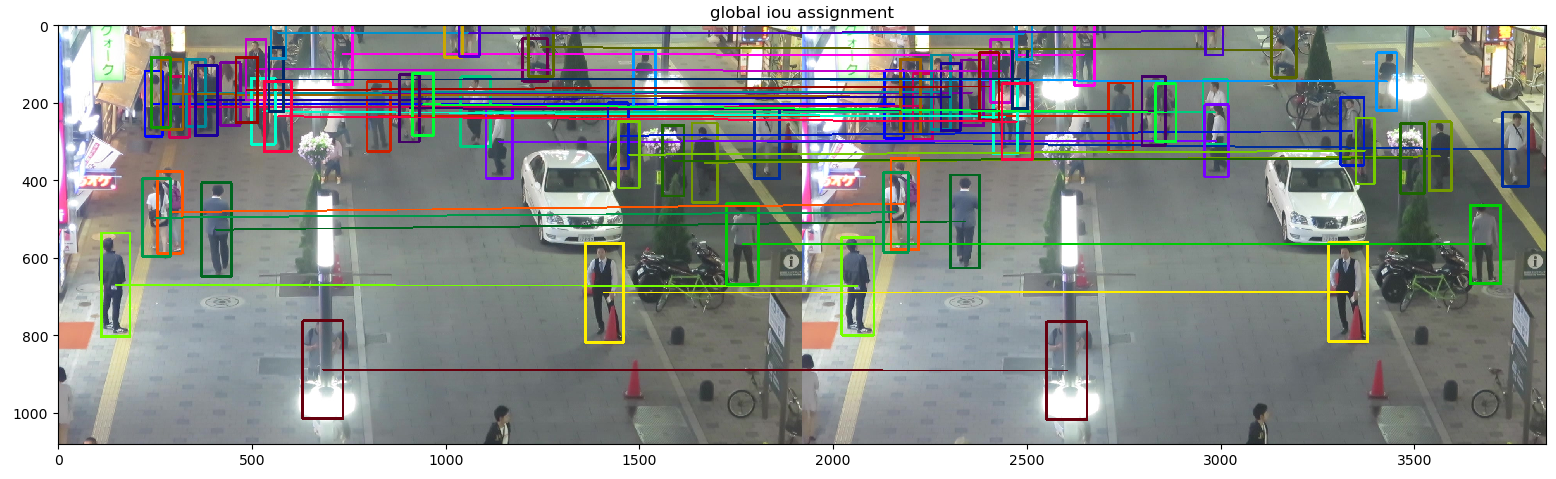
可以看到跟踪效果并不是很差,那么我们观察二者定量的结果则为:
Local: MOTA=0.77, IDF1=0.83
Global: MOTA=0.79, IDF1=0.88
相比之下全局的贪心策略比局部的要好
3 线性分配
3.1 匈牙利算法和KM算法简介
线性分配问题也叫指派问题,通常的线性分配任务是给定N个workers和N个tasks,结合相应的N×N的代价矩阵,就能得到匹配组合。其模型如下:
$$ \begin{array}{l} min = \sum\limits_{i = 1}^N {\sum\limits_{j = 1}^N {{C_{ij}}{x_{ij}}} } \\ s.t.\left\{ \begin{array}{l} \sum\limits_{i = 1}^N {{x_{ij}}} = 1\\ \sum\limits_{j = 1}^N {{x_{ij}}} = 1\\ {x_{ij}} = 0\;or\;1 \end{array} \right. \end{array} $$
上述模型有个问题,即要求workers和tasks的数量对等,然而在MOT问题中待匹配的跟踪轨迹和检测数量大概率不相同,而且我们经常还会设定阈值来限制匹配。
匈牙利算法是专门用来求解指派问题的算法,并且通常用于求解二分图最大匹配的。也就是说我们需要先利用规则判断边是否连接,然后匹配,因此不会出现非边节点存在匹配,只有可能出现剩余未匹配:
$$ \begin{array}{l} max = \sum\limits_{i = 1}^N {\sum\limits_{j = 1}^M {{L_{ij}}{x_{ij}}} } \\ s.t.\left\{ \begin{array}{l} \sum\limits_{i = 1}^N {{x_{ij}}} \le 1\\ \sum\limits_{j = 1}^M {{x_{ij}}} \le 1\\ {x_{ij}} = 0\;or\;1 \end{array} \right. \end{array} $$
匈牙利算法的问题在于一旦确定边之后就没有相对优劣了,所以我们这里介绍带权二分图匹配KM,顾名思义,就是求最小代价,只不过是不对等匹配:
$$ \begin{array}{l} min = \sum\limits_{i = 1}^N {\sum\limits_{j = 1}^M {{C_{ij}}{x_{ij}}} } \\ s.t.\left\{ \begin{array}{l} \sum\limits_{i = 1}^N {{x_{ij}}} {\rm{ = }}1\\ \sum\limits_{j = 1}^M {{x_{ij}}} \le 1\\ {x_{ij}} = 0\;or\;1 \end{array} \right. \end{array} $$
这里我们可以看到有一个维度的和要求是1,原因就是必须要保证有一个维度满分配,不然就会直接不建立连接了。
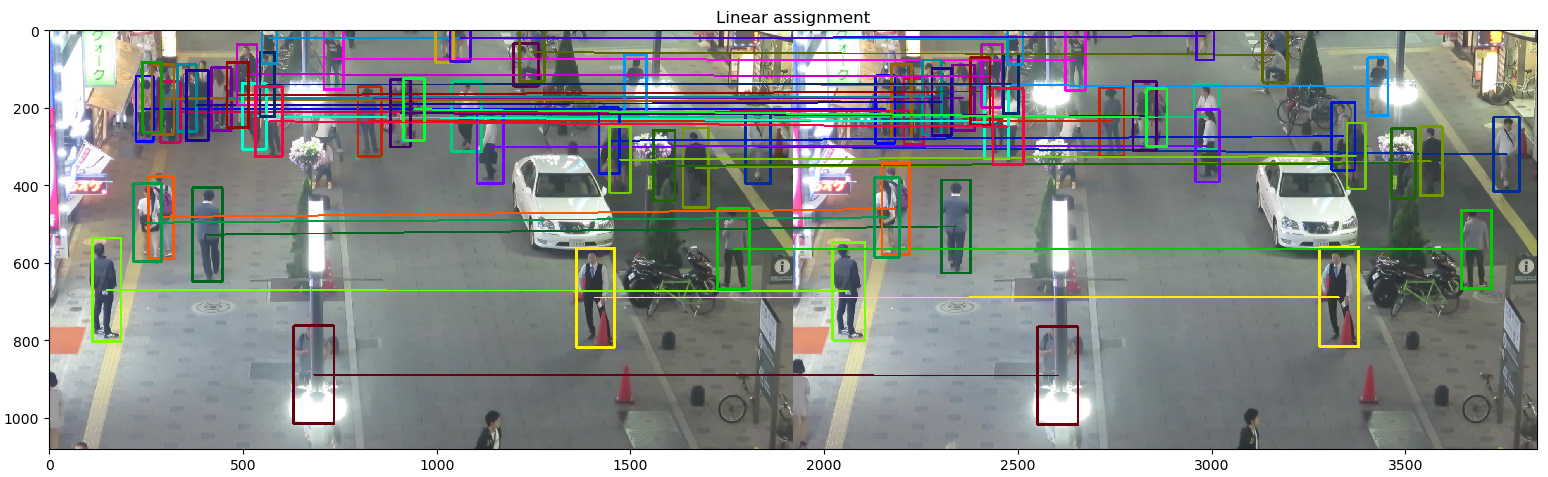
3.2 实验对比
这里我们借用scipy工具箱实现:
1 | inf_cost = 1e+5 |
同样地,为了更好地对比,我们以IOU为代价指标,分别以匈牙利算法和KM算法为数据关联算法进行实验,有意思的是对于MOT-04-SDP视频而言,二者并没有太大区别,整体效果跟Global IOU Assignment一致。
以上代码我都放到了github。

